
Invariante Erkennung und Klassifikation
- Projektgruppe:
Automatische Sichtprüfung und Bildverarbeitung
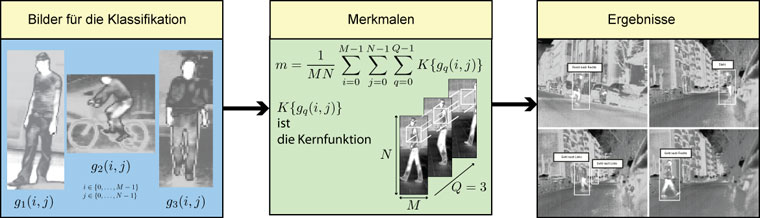
Wegen einer hohen Anzahl von Fußgängeropfern bei Verkehrsunfällen ist die Fußgängererkennung das Ziel dieses Projektes. Es ist wichtig die verwundbaren Verkehrsteilnehmer nicht nur zu bestimmen, sondern sie auch zu klassifizieren. Verschiedene Klassifikationsklassen werden mit Hilfe von theoretischen Werkzeugen wie Monom-Eigenschaften, Support-Vektor-Maschine-Klassifikatoren und Fusionsmodellen geprüft.
Motivation
Die Fähigkeit zur Erkennung und Klassifizierung von Menschen ist von grundlegender Bedeutung beim Aufbau intelligenter Systeme für Anwendungen wie visuelle Überwachung, Robotik, autonome Fahrzeuge, und Fahrerassistenz-Systemen. In den letzten Jahren, zur Unterstützung des Fahrers Systeme sind vor allem die Aufmerksamkeit der Forscher auf der ganzen Welt. Die wichtigste Motivation ist die Zahl der Todesopfer in der Verkehrsunfälle zu reduzieren. Dieses Problem wird gelöst durch die Entwicklung von Systemen der aktiven Sicherheit für die Erkennung und Klassifizierung von Verkehrsteilnehmern.
Problemdarstellung
Fußgänger Erkennung ist eine anspruchsvolle Aufgabe durch die Variabilität ihrer Auftritte und Posen. Außerdem, dem Hintergrund einer Szene Verkehr ist unglaublich unvorhersehbar, wodurch die Fußgänger-Segmentierung besonders schwierig. In den meisten Fällen mit nur einem Sensor ist nicht ausreichend. Verschiedene Arten von Kfz-Sensoren sind zur Lösung dieser Aufgabe. Häufigsten verwendeten Sensoren sind passive bildgebende Sensoren mit sichtbarem Licht und Infrarot (IR)-Strahlung, aber auch als aktive „Time-of-Flight“ Sensoren, wie Radar und Lidar. Bild Sensoren werden häufig wegen ihrer hohen lateralen Auflösung und niedrigen Kosten, aber das Extrahieren von Informationen aus ihnen die erheblichen Anteil an der Verarbeitung. Darüber hinaus sind diese Sensoren sehr sensibel auf die Umwelt Beleuchtung und Wetterbedingungen. Time-of-Flight-Sensoren liefern Informationen über die Objekte distanziert, aber sie liefern nicht genügend Daten, um eine komplexe Klassifizierung. Diese beiden Arten von Sensoren ergänzen einander, und die Fusion wird voraussichtlich zu besseren Ergebnissen als Single-Sensor-Systeme.
Ziel des Projekts
Das Ziel dieses Projekts ist die Entwicklung neuer Methoden für die automatische Erkennung und Klassifizierung von Verkehrsteilnehmern auf der Grundlage der Daten Fusion und Klassifizierung Ansätze. Diese Methoden sollten zuverlässige Ergebnisse und rechnerisch effizienter zu gestalten. Sie sollte auch für die Integration im industriellen Bereich.