
Die Automatisierung wird auch in Zukunft weiter voranschreiten und insbesondere im Haushalt mit neuartigen Assistenzsystemen Einzug halten. Diese zukünftigen, autonomen Systeme, wie etwa Haushaltsroboter, werden in einem engeren Kontakt zum Menschen stehen und sich in dessen heterogenen Umfeld zurechtfinden müssen. Die sich daraus ergebenden Herausforderungen erfordern ein flexibles Dazulernen der Maschine, etwa auf Basis von Spracheingaben oder Beschreibungen in Onlinelexika.
Herkömmliche Ansätze im Maschinellen Lernen nutzen Datensätze, die für eine Stichprobe an Beobachtungen Merkmale der Klassen respektive Objekte enthalten. Im Gegensatz dazu lassen sich aus semantischen Beschreibungen in der Regel nur Objektmodelle, die Kategorien oder Merkmalsbereiche enthalten, ableiten. Hierbei spielen insbesondere High-Level-Merkmale eine Rolle.
Die aus unspezifischem Wissen entstehende Unsicherheit – auch epistemologische Unsicherheit genannt – lässt sich u.a. mithilfe der Belief-Theorie (Evidenztheorie) beschreiben. Fehlende Festlegung bzw. fehlendes Wissen wird durch elementare Wahrscheinlichkeiten, die auf Mengen für diskrete Räume und auf Intervallen bzw. Hypervolumen für kontinuierliche Räume definiert sind, modelliert.
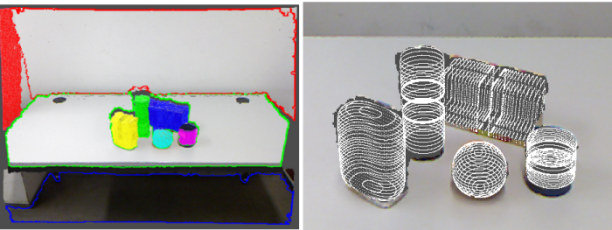
In der Forschungsarbeit werden Alltagsgegenstände auf Basis von Tiefen- und RGB-Daten und der daraus gewonnenen Merkmale klassifiziert. Sie gehört damit gleichfalls in den Bereich der Computer Vision und des Maschinellen Lernens. Für die zu unterscheidenden Objekte wird Kenntnis über die grundlegende Form, Dimension und Farbe vorausgesetzt und daraus für die zugehörigen Merkmalsräume bedingte Belief-Funktionen erzeugt. Als High-Level-Merkmal, welches die Form der Gegenstände beschreibt, werden u.a. die Parameter einer Superquadric-Suche genutzt.
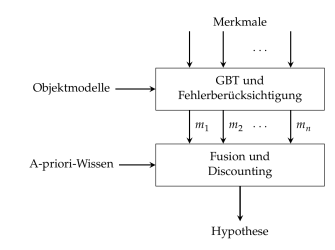
Die aus Bildsequenzen gewonnenen Merkmale werden rekursiv fusioniert und damit die Schätzung, welches Objekt gerade beobachtet wird, schrittweise konkretisiert und verbessert. Die Fusion basiert auf einer konsequenten Umsetzung der Belief-Theorie, Nutzung der Dempster-Shafer-Kombination und berücksichtigt hierbei ebenfalls, dass Merkmale fehlerbehaftet sind. Im Gegensatz zu anderen wissenschaftlichen Arbeiten wird die Belief-Theorie hier auch für mehrdimensionale kontinuierliche Merkmalsräume genutzt, indem spezielle, multivariate, analytisch zu berechnenden Belief-Funktionen konstruiert wurden. Weisen die zugrundeliegenden Objektmodelle epistemologische Unsicherheit auf, werden im Vergleich zur Bayes-Rekursion bessere Korrektklassifikationsraten erreicht. Da die Repräsentation des aktuellen Zustands – also das von der Maschine vermutete Objekt – durch elementare Wahrscheinlichkeiten über Mengen erfolgt, kann dies zu einer Multiklassen-Kategorisierung genutzt werden. Sind die aus einer Bildsequenz gewonnenen Merkmale noch nicht diskriminierend genug, wird die Entscheidung nicht bezüglich eines konkreten Gegenstandes gefällt, sondern die wahrscheinlichste Menge der möglichen Gegenstände ausgegeben. Fehlklassifikationen können somit reduziert werden, ohne das a priori eine Hierarchie der Objektklassen bekannt ist.
Herkömmliche Ansätze im Maschinellen Lernen nutzen Datensätze, die für eine Stichprobe an Beobachtungen Merkmale der Klassen respektive Objekte enthalten. Im Gegensatz dazu lassen sich aus semantischen Beschreibungen in der Regel nur Objektmodelle, die Kategorien oder Merkmalsbereiche enthalten, ableiten. Hierbei spielen insbesondere High-Level-Merkmale eine Rolle.
Die aus unspezifischem Wissen entstehende Unsicherheit – auch epistemologische Unsicherheit genannt – lässt sich u.a. mithilfe der Belief-Theorie (Evidenztheorie) beschreiben. Fehlende Festlegung bzw. fehlendes Wissen wird durch elementare Wahrscheinlichkeiten, die auf Mengen für diskrete Räume und auf Intervallen bzw. Hypervolumen für kontinuierliche Räume definiert sind, modelliert.
In der Forschungsarbeit werden Alltagsgegenstände auf Basis von Tiefen- und RGB-Daten und der daraus gewonnenen Merkmale klassifiziert. Sie gehört damit gleichfalls in den Bereich der Computer Vision und des Maschinellen Lernens. Für die zu unterscheidenden Objekte wird Kenntnis über die grundlegende Form, Dimension und Farbe vorausgesetzt und daraus für die zugehörigen Merkmalsräume bedingte Belief-Funktionen erzeugt. Als High-Level-Merkmal, welches die Form der Gegenstände beschreibt, werden u.a. die Parameter einer Superquadric-Suche genutzt.
Die aus Bildsequenzen gewonnenen Merkmale werden rekursiv fusioniert und damit die Schätzung, welches Objekt gerade beobachtet wird, schrittweise konkretisiert und verbessert. Die Fusion basiert auf einer konsequenten Umsetzung der Belief-Theorie, Nutzung der Dempster-Shafer-Kombination und berücksichtigt hierbei ebenfalls, dass Merkmale fehlerbehaftet sind. Im Gegensatz zu anderen wissenschaftlichen Arbeiten wird die Belief-Theorie hier auch für mehrdimensionale kontinuierliche Merkmalsräume genutzt, indem spezielle, multivariate, analytisch zu berechnenden Belief-Funktionen konstruiert wurden. Weisen die zugrundeliegenden Objektmodelle epistemologische Unsicherheit auf, werden im Vergleich zur Bayes-Rekursion bessere Korrektklassifikationsraten erreicht. Da die Repräsentation des aktuellen Zustands – also das von der Maschine vermutete Objekt – durch elementare Wahrscheinlichkeiten über Mengen erfolgt, kann dies zu einer Multiklassen-Kategorisierung genutzt werden. Sind die aus einer Bildsequenz gewonnenen Merkmale noch nicht diskriminierend genug, wird die Entscheidung nicht bezüglich eines konkreten Gegenstandes gefällt, sondern die wahrscheinlichste Menge der möglichen Gegenstände ausgegeben. Fehlklassifikationen können somit reduziert werden, ohne das a priori eine Hierarchie der Objektklassen bekannt ist.